
LEGACY Conveyor tracking guide (CB3 ≤ 3.8 and e-Series ≤ 5.2)
The conveyor tracking functionality adjusts robots paths to the motion of a conveyor.
The conveyor tracking functionality adjusts robots paths to the motion of a conveyor.
Conveyor tracking for linear and circular conveyors is available from software version 1.8.
This example is based on setup on a CB2 controller but can also be used on CB3 and e-Series.
For PolyScope versions newer than 3.8 and 5.2 see: https://www.universal-robots.com/articles/ur/programming/new-conveyor-tracking-guide-cb3-38-and-e-series-52/
Lower down on this page is an example of a linear and circular setup.
Note:
The CB3 and e-Series controller can decode signals at up to 40kHz
The CB2 controller can only decode signals at <50Hz, (<25Hz for quadrature signals)
Script codes for conveyor tracking
| Script code | Description | ||
|---|---|---|---|
| conveyor_pulse_decode(type, A, B) | Sets controller to treat digital inputs A and B as pulses from encoder | ||
| get_conveyor_tick_count() | Feedbacks the counting of the encoder function | ||
| set_conveyor_tick_count(tick_count) | Sets the count value of encoder (absolute encoder) | ||
| stop_conveyor_tracking() | Lets robot follow the original trajectory instead of following the encoder value | ||
| track_conveyor_circular(center, ticks_per_revolution, rotate_tool) | Makes robot movement follow a circular trajectory | ||
| track_conveyor_linear(direction, ticks_per_meter) | Makes robot movement follow a linear trajectory |
Conveyor tracking can use both absolute and incremental encoders
- Incremental Encoders
Use script function conveyor_pulse_decode(type, A, B) to make the robot controller decode pulses on digital input number "A" and "B". The supported types are:
0 : no encoder, pulse decoding is disabled.
1 : quadrature encoder, input A and B must be square waves with 90 degree offset. Direction of the conveyor can be determined.
2 : rising and falling edge on single input (A).
3 : rising edge on single input (A).
4 : falling edge on single input (A).
The CB3 controller can decode signals at up to 40kHz
The CB2 controller can only decode signals at <50Hz, (<25Hz for quadrature signals), so you must choose your encoder resolution and encoder disc size carefully. The controller interpolates the encoder ticks, so the precision is high as long as the conveyor speed is relatively constant.
For a linear conveyor, you can calculate the number of ticks per second with the following formula:
ticks_per_second = conveyor_speed[m/s] * encoder_resolution[ticks/revolution] / (2*pi*encoder_disc_radius[m/revolution])
- Absolute Encoders
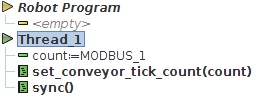
You can input absolute encoder readings into the controller with the function set_conveyor_tick_count(value) Do it in a thread in your program. If MODBUS signal MODBUS_1 contains readings from an encoder:
- Check encoder counting
You can check the counting of the encoder with the script function get_conveyor_tick_count()
Track linear conveyor SIMULATED
Use the script function track_conveyor_linear(direction, ticks_per_meter) to enable tracking on linear conveyors. Use stop_conveyor_tracking() to return to normal operation. The direction is a pose value, note that only the three positional parameters are used.
The following program makes move along the x-axis of the robot base coordinate system due to the ticks of a simulated encoder in Thread_1: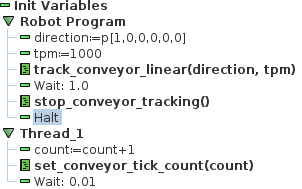
Download sample program at the buttom of the page. File name is SIMULATED_track_linear_conveyor.urp
Track circular conveyor SIMULATED
Use the script function track_conveyor_circular(center, ticks_per_revolution, rotate_tool) to enable tracking on circular conveyors.
Use stop_conveyor_tracking() to return to normal operation.
The center is a pose value, determining the center which the conveyor rotates about.
You can use a feature as the center variable.
rotate_tool determines if the tool should rotate with the conveyor or stay in its original orientation.

Download sample program at the bottom of the page. File name is SIMULATED_track_circular_conveyor.zip
Important: It is required to download and load the installation file, included in the .zip file, as it contains a feature that defines the center of the conveyor