Rotate around an axis
One example of move and rotate around any axis (and including the base and tool coordinate )
An example on how to turn the robot tool around the z-axis (could be any axis)
Examples are valid for:
CB2 Software version: 1.8.16941
CB3 Software version: 3.1.17779
e-Series Software version: All versions
Note that older or newer software versions may behave differently.
These examples can be used for both CB2,B3 and e-Series.
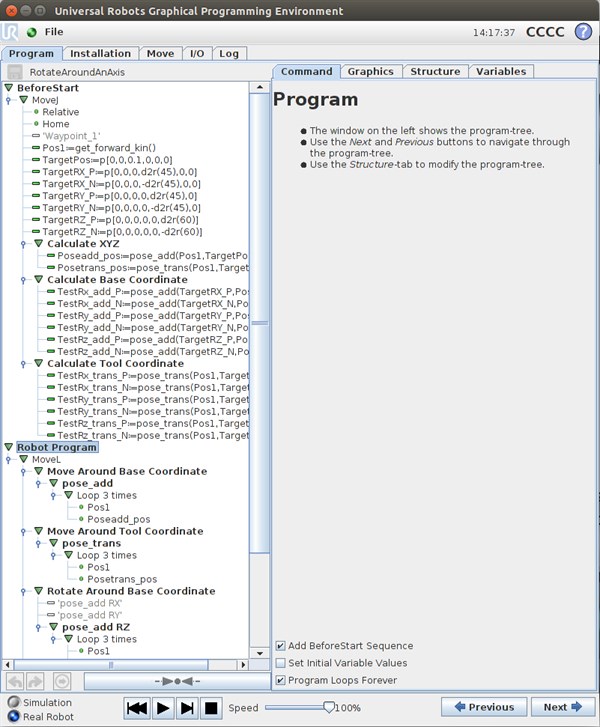
This example show how to move some particular distance along the X,Y,Z direction in Base and Tool coordinate and how to rotate around these axis some particular degree use the command of pose_add and pose_trans, it will be useful when we need precise movement or rotation pose of robot.
More information on script functions can be found in the script manual. The script manual can be found in the download section.
The Folders in the program explains what is going on at each step.