Novo recurso no Polyscope 5.6
Nossos clientes sempre expressaram um forte interesse em automatizar processos como distribuição, polimento, costura, entre tantos outros com os robôs colaborativos. Você falou, e nós ouvimos!
Primeiramente adicionamos o recurso TCP remoto (ponto central da ferramenta) no Polyscope 5.4. Dessa forma, nossos cobots passaram a mover-se em uma velocidade constante em relação a um TCP fixo (remoto). Agora, estamos lançando um recurso ainda mais interessante: o suporte ao caminho da ferramenta de código G, no Polyscope 5.6.
Para aqueles que já usam os robôs colaborativos é sabido que é possível programar os movimentos do robô utilizando waypoints e movimentos circulares. Para isso, um operador faz o movimento necessário para a execução da função segurando o braço robótico, e o mesmo aprende e armazena essa informação para executá-la repetidas vezes.
Essa abordagem é perfeitamente adequada para aplicações comuns de cobot, como para alimentação de máquinas, paletização ou pick-and-place. No entanto, para processos mais elaborados, que exigem que trajetórias mais complexas dos cobots esse mecanismo não funciona tão bem.
Imagine que você precisa programar um robô para distribuir a junta de líquido em cima de um bloco de motor de carro. Quanto tempo você levou para terminar de ensinar todos os waypoints necessários para o robô rastrear o contorno do motor? Talvez algumas horas, ou até um dia, ou dois?
A solução: programação robótica com Código G
Uma alternativa para enfrentar essa questão era a programação offline robótica (OLP). A partir dela, você cria uma célula de trabalho virtual no software OLP. Em seguida, programa e simula o movimento do robô. Por fim, o software gera um arquivo de programa que você pode instalar diretamente no seu cobot. Para alguns clientes, essa pode ser uma abordagem aceitável. Mas, e se você não tiver o orçamento para o software OLP ou não tiver as pessoas certas para aprender e usá-lo? Existem alternativas?
Então, nós analisamos muitas soluções no mercado e concluímos que havia uma lacuna entre a programação básica de waypoints e o OLP. Portanto, decidimos lançar este novo recurso: a ferramenta de código G, portanto, preenche a lacuna e torna mais acessível a programação de tarefas complexas com os cobots.
Funcionamento do código G
O código G é uma linguagem padrão do setor usada para usinagem CNC. Com esse tipo de programação é possível dizer aos motores das máquinas CNC para onde se mover, com que rapidez se mover e qual caminho seguir.
Os robôs são fundamentalmente semelhantes às máquinas CNC, pois cada junta também é acionada por um motor. Só precisamos encontrar uma maneira de interpretar o código G e gerar comandos de robô de acordo, o que foi bastante viável para nossa equipe de desenvolvimento inteligente.
Escolhemos o código G em específico porque é amplamente suportado pelo software CAD / CAM. Não é necessário comprar ou aprender um software adicional se você já estiver usando um pacote CAD / CAM. Outros formatos, como o DXF, são capazes de definir a geometria de um caminho, mas geralmente não contêm todas as informações necessárias, como orientação da ferramenta, velocidade e aceleração para a programação do robô.
Como programar
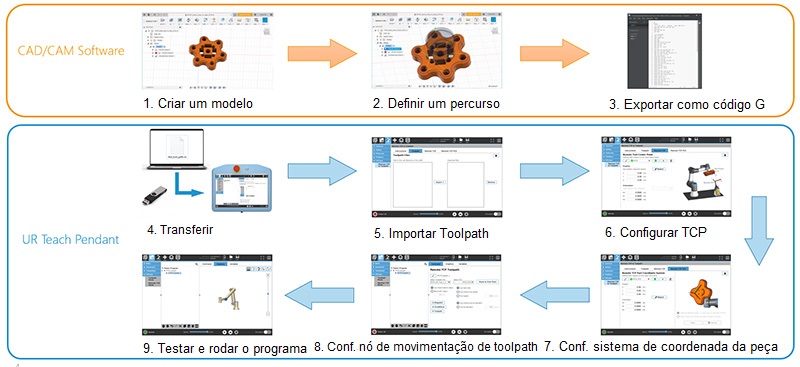
Então, como é o fluxo de trabalho?
- Primeiro, você define um caminho da ferramenta de código G com base no modelo CAD da sua peça de trabalho no seu software CAD / CAM.
- Segundo, importe o caminho da ferramenta de código G para o Polyscope através de uma unidade USB.
- Terceiro, informe ao robô onde está o caminho da ferramenta, configurando um sistema de coordenadas da peça, que é apenas o quadro de referência do seu caminho.
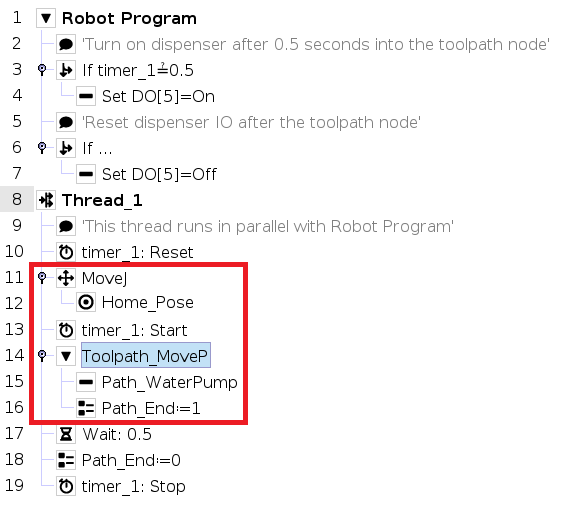
Após essas etapas, o robô está pronto para executar seu percurso em um programa. Depois que o caminho da ferramenta é gerado, normalmente leva menos de meia hora para um usuário criar um programa no Polyscope. O tempo de programação do robô é reduzido significativamente. A árvore do programa no Polyscope também é muito concisa. Assim, não é mais necessário programar uma longa lista de waypoints e movimentos circulares.
Esse recurso de toolpath de código G, juntamente com o TCP remoto, está disponível no TCP e toolpath remoto URCap no Polyscope 5.6.
Robótica colaborativa e acessível
A utilização de código G para programação dos nossos cobots é mais um passo no sentido de tornar a automação nas indústrias acessível e de fácil utilização e instalação, como é a missão da Universal Robots.
Nossos braços robóticos colaborativos de seis eixos são amigáveis para dividir o espaço laboral com humanos, ocupam um espaço reduzido e tornam fácil automatizar quase qualquer tarefa. Agora com o código G essa realidade se abre para ainda mais possibilidades para atender as necessidades de indústrias de todo o mundo. Conheça nossa linha de cobots e aprenda a programá-los e operá-los com a UR Academy.









