Ačkoliv je automatizace jedním z nejskloňovanějších termínů posledních několika let, lze podle některých odhadů automatizovat zatím jen zlomek veškeré lidské práce. Ve výrobních odvětvích tento proces pochopitelně postupuje mnohem rychleji, a i když se můžeme setkat s plně robotizovanými linkami, je stále celá řada činnosti, které dnes lze provádět pouze manuálně nebo ve spolupráci s člověkem. Ale s tím, jak se technologie rychle vyvíjejí, umožňují postupně automatizovat i ty operace, o kterých byli ještě nedávno všichni přesvědčeni, že automatizovat nelze.
Velký skok v automatizaci nejrůznějších činností ve výrobě přinesla kolaborativní robotika, která umožnila rozdělit pracovní úkol na rutinní a kreativní část. Monotónní, nudné popř. nebezpečné činnosti zastal kobot a aktivity vyžadující úsudek, rychlou reakci a kreativitu zase člověk. V bezprostřední spolupráci robota s lidským pracovníkem se otevřel obrovský potenciál v oblasti vývoje kolaborativních aplikací a robotizace úkolů – i těch, jejichž automatizaci jsme si ještě nedávno nedokázali představit.
Pojďme se podívat na pět takových aplikací:
1. Manipulace s plochými a perforovanými objekty
Prvními aplikacemi využívajícími kolaborativní roboty byly zejména pick & place či obsluha strojů, které s pomocí prstových uchopovačů manipulovaly s objekty z míst A do místa B. Ačkoliv uchopovače poskytovaly značnou flexibilitu co tvaru objektu, hmotnosti a materiálu, byl problém s manipulací velkých plochých předmětů (např. LED obrazovek) či perforovaných desek (typicky desky plošných spojů). Klasické vakuové uchopovače zanechávaly na lesklých površích stopy a na perforované desce zase nebyly schopné vytvořit podtlak. Teprve s vývojem tzv. gecko uchopovače využívajícího van der Waalsovy síly je možné manipulovat s perforovanými předměty a bez otisků.
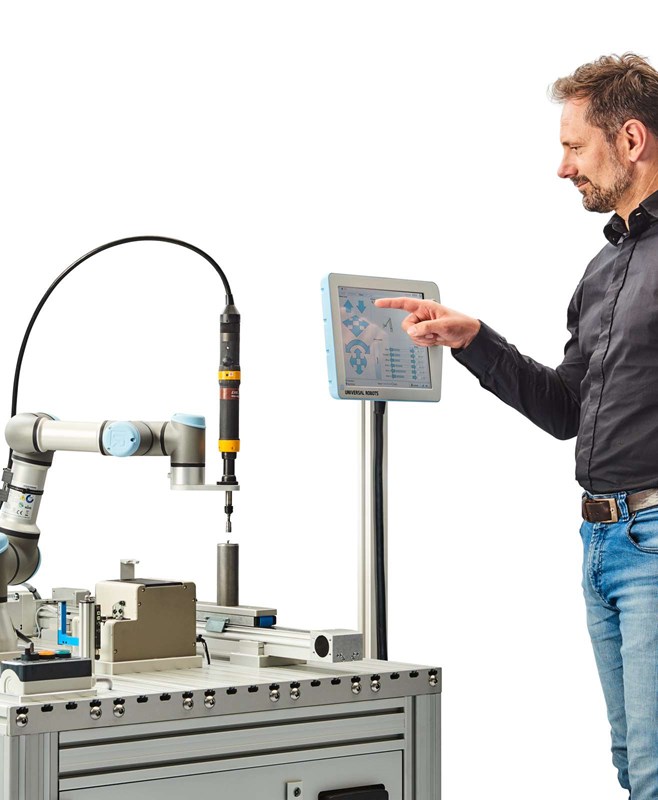
2. Plně automatizované šroubování
Šroubování je jednou z nejčastějších montážních činností, která klade velké fyzické nároky na pracovníky, zejména pokud musejí šroubovat ve stísněných prostorech, např. na výrobní lince v automotive průmyslu. K automatizaci šroubování je třeba vytvořit koncový nástroj, který vykonává všechny úkony od umístění šroubu až k dosažení přesných momentů utažení. Některé šroubovací nástroje mohou být opatřeny podtlakovým systémem, který udrží šroub na nástroji tak, aby i v případě šroubování v hlubším otvoru předčasně nevypadl a byl správně utažen. V oblasti kolaborativních apliakcí plně automatizované aplikace šroubování dnes již existují a jsou v běžném provozu.
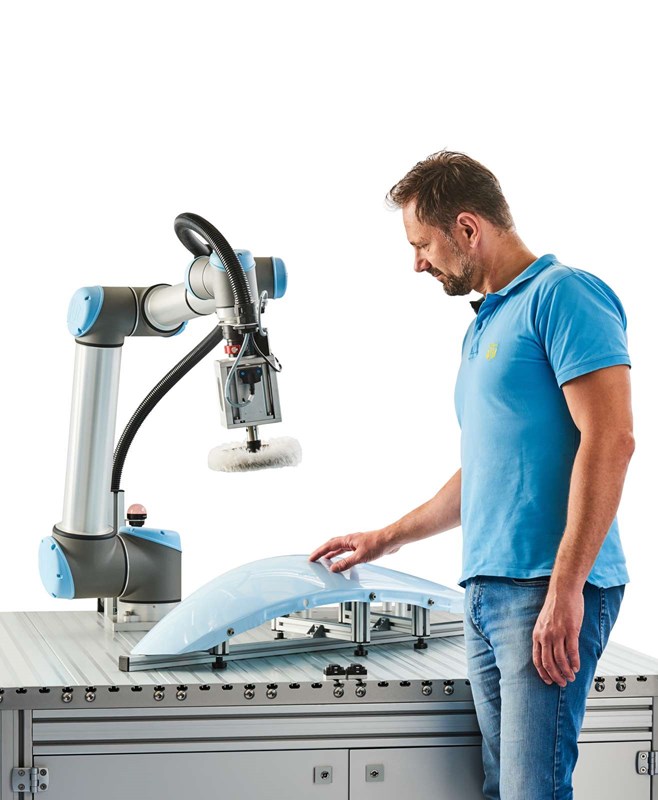
3. Úpravy nepravidelných povrchů
Tzv. dokončovací práce hrají velkou roli ve vzhledu finálních produktů, a proto je velmi důležitá konzistentní kvalita opracovaného povrchu. Pokud se provádí manuálně, kvalita silně kolísá, protože člověk není schopný vyvinout stejnoměrný tlak po celém povrchu. To běžný nástroj vyvinout dokáže, ale svou sílu neumí přizpůsobit nepravidelnostem např. automobilové karoserie. Teprve kobot s vestavěným senzorem síly a točivého momentu (F/T) dokáže působit na povrch konstantní silou bez ohledu na jeho kontury. Díky přesnému měření síly a momentu na 6 osách s pomocí optické technologie senzoru je nyní možné automatizovat aplikace jako broušení, smirkování, odstraňování otřepů či leštění. U brusných kolaborativních aplikací lze navíc nastavit i náhodnou kruhovou trajektorii, jež eliminuje dráhy viditelné typicky po strojovém broušení dřevěných povrchů.
4. Kontrola kvality na nedostupných místech
Kontrola kvality a inspekce je jedním z úkolů, které jsou velmi náchylné na chybovost lidského faktoru, a proto je velká snaha tento proces automatizovat k dosažení 100% správného výsledku. Často je třeba provádět inspekci v těžko dostupných místech, například při kontrole spojů automobilových či leteckých konstrukcí. Tento úkol se podařilo automatizovat s pomocí systémů strojového vidění, kdy robot přenese kameru do daného bodu, pořídí snímek, který je odeslán do systému k vyhodnocení a v případě správného výsledku pokračuje dále. V opačném případě je přivolán operátor. Jedná se o typickou kolaborativní aplikaci, kdy robot provádí namáhavé činnosti na těžko dostupných místech místo operátora, který je k dispozici jen k řešení výjimečné situace. Další variací je robotická inspekce infračervenou termografií, která se využívá zejména v leteckém průmyslu k odhalování skrytých defektů.
5. Manipulace s potravinami
Potravinářský průmysl je často vnímán jako méně vhodný k průmyslové automatizaci, jednak kvůli delikátnosti manipulovaných objektů a jednak z důvodu přísných požadavků na čisté prostory. Sice existuje řada aplikací automatizovaného paletování potravinářských produktů v krabicích a baleních, avšak manipulace s křehkými produkty byla prakticky nemožná. Teprve s přesnými F/T senzory, které dokáží citlivě nastavit sílu úchopu, a tzv. „soft grippery“, tedy uchopovači s měkkými kalíšky, mohou firmy z potravinářství automatizovat manipulaci se širokou škálou sortimentu nepravidelných tvarů a křehké konzistence, včetně vajec, ovoce, plechovek či lahví.










