Robot claw designs inspired the 2- and 3-finger grippers that are so popular with users of collaborative robots. The claw-like design principle has also inspired a variety of soft gripper designs.
We'll look at specific examples of these grippers in action below, but first let's briefly explore the differences between robot claws and mechanical claws.
How does a mechanical claw work?
Mechanical claws are often used for gripping/clamping items in manufacturing environments. The two most common types of claws and clamps used are mechanical and hydraulic. Hydraulic clamping/gripping systems are best suited to high volume applications and to applications where critical tolerances must be maintained. Using electric pumps and digital pressure switches, hydraulic claws provide around 1% accuracy in clamping force.
Mechanical clamping and claw systems are a good fit for small production batches and in situations where wide tolerances are acceptable. Mechanical systems are usually adjusted manually using a wrench, which produces around 10% accuracy in clamping force. Cheaper than their hydraulic counterparts, but also more time consuming to operate, mechanical claws and clamps are commonly used in extreme manufacturing environments such as during high temperature operations, where hydraulic systems would not be safe to use.
Mechanical claws use various methods to close their pincers. For example, in some designs when a piston in the middle is lifted, the pincers close. In other mechanical claw designs, an electromagnet is used to bring the pincers together. The principle is always the same, however with the gripper using jaws to grasp an object.
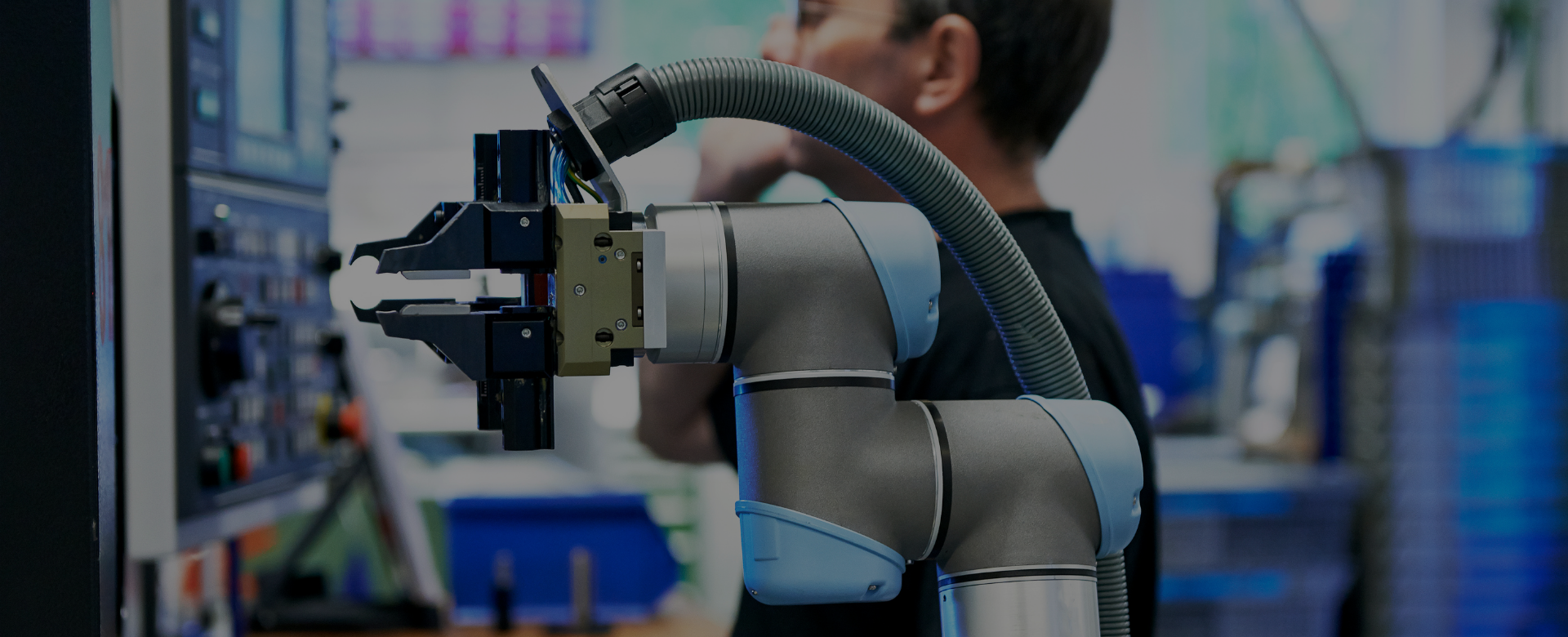
There are many claw-like end effectors found on collaborative robots, from soft grippers to 2- and 3-finger grippers. These 'robot claws' provide levels of intelligence and autonomy that are way beyond the capabilities of their mechanical counterparts. For example, a robot claw (or a robot clamp) can provide useful feedback to your cobot and PLC. This data can then be used to finetune your manufacturing processes. Cobot grippers are also smaller and more precise than mechanical claws.
Let's take a look at some of the claw-like and claw-inspired grippers available through UR+,a global ecosystem of components, software, and application kits that have been validated and certified to be mechanically, electrically, and digitally compatible with cobots from Universal Robots.
Cobots with robot claws
Parallel grippers (sometimes referred to as 2-finger, or 2-jaw grippers) involve two pincers closing parallel to the workpiece in order to achieve grip. From this simple claw-like design, ingenious engineers have developed a wide range of versatile gripper technologies that have found uses in manufacturing applications from material handling and assembly through to packaging & palletizing. Parallel grippers are either electrical, pneumatic or hydraulic. One limitation of parallel grippers is that they can only accomplish a pinch-type grasp, which does limit their versatility. Adaptive grippers bring new levels of functionality to parallel gripper design. Adaptive grippers are able to adapt themselves to different product shapes without having to be reprogrammed every time.
Gimatic's KIT-UR-G, for example, is an electric, 2-finger parallel gripper that can be directly connected to your UR cobot's wrist. Compatible with UR3 through UR10e cobots, this gripper is used for material handling, assembly and machine tending applications.