Robotic arms are a highly recognised and widely used tool in different industries and are capable of doing heavy-weight tasks and hazardous materials-related tasks. These have been in use for a decade in factories and laboratories. Like any other robot, multiple industrial robot components are grouped to form an arm. All these robotic arm components come together in cohesion to make it work properly. In this article, we will understand the five basic robotic arm parts. So, keep reading.
The speed, compactness, and affordability of modern robots are well known. Nowadays, robots are employed extensively throughout a wide range of sectors, including the robotic welding of aluminum for autos, heavy equipment, railroad locomotives, door frames, and other items.
Technological developments and new, creative robot designs are primarily to blame for this. While such claims are accurate, robot components are one facet of robotics advancement that is sometimes overlooked.
Industrial robots are composed of several components that cooperate in carrying out diverse duties. They have also progressed along with technology, leading to higher-performing robots. What exactly a robot is made of and how it functions remains a mystery. Here is a brief and simple explanation of robotic arm parts.
The Five Basic Robotic Arm Components
In order to create the structure of a robot, metallic and electrical pieces are fused together. Each component serves a structural purpose, such as isolating electrical components, or a functional purpose, such as supplying the robot with electricity. Although robot manufacturers may use different components depending on the design of their robots, the general idea and the functions of such parts are frequently the same.
Controllers
The main component of the robotic arm is the primary processor, and its brains are called controllers. They can either function automatically according to programming or through human operation by directly transmitting instructions from a technician. They come in a number of forms depending on the amount of computing power required and are essentially the control consoles for the robotic arms.
While some of the controllers used in big industries are sophisticated computer systems, others, like those included in science project kits, are straightforward joysticks. For instance, the FANUC Lr Mate 200ic uses an R-30ia controller, whereas the Motoman MH50 pairs with a Motoman DX100.
Arms

The arm is the major part of the robot arm and consists of three parts: the shoulder, elbow, and wrist. These are all joints, with the shoulder lying at the base of the arm, often attached to the controller, and it may move forward, backward, or spin.
The elbow, which is at the centre of the arm, permits the upper portion to move forward or backwards without affecting the lower portion. The wrist, which connects to the end effector, is located at the very end of the upper arm.
End Effector
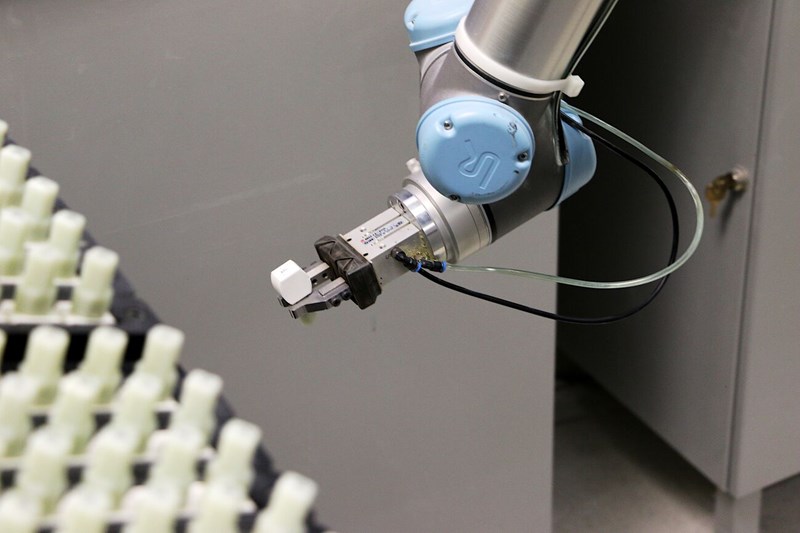
The robotic arm's end-effector serves as its hand. It typically has two claws, but occasionally there are three, and they may open and close at will. It also spins at the wrist, facilitating simple material and equipment movement. To complete arc welding applications, the GarLine C, an optical laser seam tracking welding sensor, may be used.
Drives
The drive is the engine or motor that drives the links into their prescribed places. The spaces in between the joints are known as "links." Hydraulic, electric, or pneumatic drives are typically employed by industrial robot arms. Robots using hydraulic driving systems can move quickly and powerfully.
An electric system reduces a robot's speed and strength. Pneumatic driving methods are employed for smaller robots with fewer axes of motion. Drives should routinely be checked for wear and replaced as necessary.
Sensors
The industrial robotic arm's sensors enable it to get information about its surroundings. They might be able to give the robot some limited hearing and vision. The sensor gathers data and electronically transmits it to the robot under control.
These sensors can be used, for example, to prevent two closely collaborating robots from colliding. By compensating for component variations, sensors can also help end effectors. Thanks to vision sensors, a pick and place robot can distinguish between objects to choose from and objects to disregard, thanks to vision sensors.
Conclusion
The calibre and performance of an industrial robot are determined by the parts' quality and the craftsmanship employed to assemble them into a robot. This is maybe what distinguishes a top industrial robot manufacturer from the competition. We hope this article was useful to our readers looking for information regarding industrial robot components and robotic arm parts.









