Quali sono i modelli di gripper e loro utilizzo
Pinze: dispositivi speciali progettati per aiutare i robot a manipolare oggetti nel mondo reale. Le pinze sono anche conosciute come "end-effector" o "manipolatori". Le mani umane sono soggette a errori, specialmente se assegnate a compiti ripetitivi. Le pinze robotiche non si stancano nemmeno quando vengono impiegate su compiti ripetitivi 24 ore su 24, 7 giorni su 7.

Idrauliche, pneumatiche, a due o tre dita: le pinze sono molteplici e ciascuna si adatta ad un uso specifico
Se pensi a un robot industriale come a uno strumento composto da un braccio, un "gomito" e un "polso" per il movimento e una "mano" per raccogliere le cose, non sei lontano dalla verità, anzi, stai pensando proprio come uno scienziato robotico. Le "braccia" dei robot industriali, come vengono chiamate, hanno gomiti e polsi. E, all'estremità del braccio, i robot sono spesso dotati di quelle che vengono chiamate pinze, dispositivi speciali progettati per aiutare i robot a manipolare oggetti nel mondo reale. Le pinze sono anche conosciute come "end-effector" o "manipolatori". Le mani umane sono soggette a errori, specialmente se assegnate a compiti ripetitivi. Le pinze robotiche non si stancano nemmeno quando vengono impiegate su compiti ripetitivi 24 ore su 24, 7 giorni su 7.
Alcune pinze sembrano proprio mani, mentre altre sembrano una mano con due o tre dita. Alcune pinze assomigliano più ad artigli robot. Altre pinze sono dotate di ventose giganti. Altre sembrano una morbida palla rotonda. Alcune hanno punte magnetizzate. E le pinze ricevono la loro potenza in diversi modi: sistemi elettrici, pneumatici e idraulici.
L'incredibile varietà di tipi di pinze è dovuta all'enorme varietà di oggetti che i robot possono gestire, dai tessuti ai componenti elettronici e alle componenti automobilistiche. Per la manipolazione diretta di alimenti delicati, ad esempio, è probabile che una piccola pinza morbida sia la scelta migliore. Ma per le operazioni di confezionamento e pallettizzazione, dove è necessario impilare scatole di prodotto, una pinza con grandi ventose è probabilmente la soluzione più adatta. I robot di Universal Robots sono compatibili praticamente con ogni tipo di pinza, comprese quelle sopra elencate. In questo articolo, daremo un'occhiata ad alcune delle pinze più comuni.
Quando si seleziona una pinza, ci sono alcune considerazioni chiave da premettere per poter scegliere adeguatamente.

Applicazione
La scelta della pinza dovrebbe essere guidata principalmente dall'applicazione che avete in mente per la vostra automazione. Gestirà prodotti in piccoli lotti? La pinza deve avere forza o un tocco delicato? La pinza deve essere certificata per alimenti? La buona notizia è che, indipendentemente dall'applicazione che hai in mente, ad esempio per la manipolazione di componenti elettrici delicati o per l'assemblaggio o la pallettizzazione di scatole di grandi dimensioni, troverai la pinza perfetta su UR+, l'ecosistema di componenti di terze parti di Universal Robots certificato per funzionare perfettamente con i robot UR.
Carico utile
Il carico utile si riferisce all'intero peso che il braccio del robot è in grado di supportare, incluso quello della pinza. Proprio come il tuo braccio e la tua mano possono sollevare solo determinati pesi in palestra, un robot può gestire solo un peso limitato senza vacillare. Quindi, quando si sceglie la mano del robot, è necessario considerare all’interno della capacità di carico utile del braccio robotico anche il peso della pinza.
Scenari del mondo reale
L'assistenza alle macchine è un'attività ripetitiva che è ideale per l'automazione mediante robot collaborativi. Invece di assegnare i lavoratori a queste attività manuali, prendi in considerazione l'utilizzo di cobot dotati di pinze in grado di manipolare parti e assumere il controllo delle operazioni della macchina. Non solo questo produrrà risultati più coerenti, ma libererà i tuoi operatori e potrai assegnarli su task a maggior valore, più adatti alle competenze umane, come, ad esempio, la supervisione della programmazione e delle prestazioni del tuo cobot.
Immagina un'installazione di ispezione qualità in un affollato impianto di produzione di elettronica. Un robot dotato di una pinza può essere programmato per prelevare articoli da un trasportatore a intervalli regolari e la pinza può quindi orientare il pezzo a fini di ispezione prima di restituirlo al trasportatore. Uno degli end effector più comuni per lavori medio-piccoli sono le pinze a dito o a ganasce. Le pinze per dita di solito sono disponibili nella configurazione a 2 e 3 dita. Le pinze dei robot, in particolare quelle che utilizzano le dita o le ganasce, spesso incorporano un "sensore di forza", che controlla la quantità di forza applicata in modo da evitare la rottura o il danneggiamento del prodotto.

QUALI SONO I TIPI DI PINZE ROBOT?
I robot collaborativi di Universal Robots sono stati progettati per essere compatibili con quasi tutti i tipi di pinze:
PINZE SERVO-ELETTRICHE
Queste pinze sono dotate di un motore elettrico e di un controller. Il controller fornisce un segnale relativo alla forza, alla posizione o alla velocità richiesta dal robot. La pinza riceve il segnale e il suo motore esegue il movimento desiderato. Alcune pinze servoelettriche hanno funzionalità aggiuntive che comunicano con il sistema di controllo. Ad esempio, quando un pezzo viene prelevato, la pinza invia queste informazioni al sistema di controllo. Si tratta di informazioni utili che possono essere utilizzate per ridurre gli errori sulla linea di produzione.
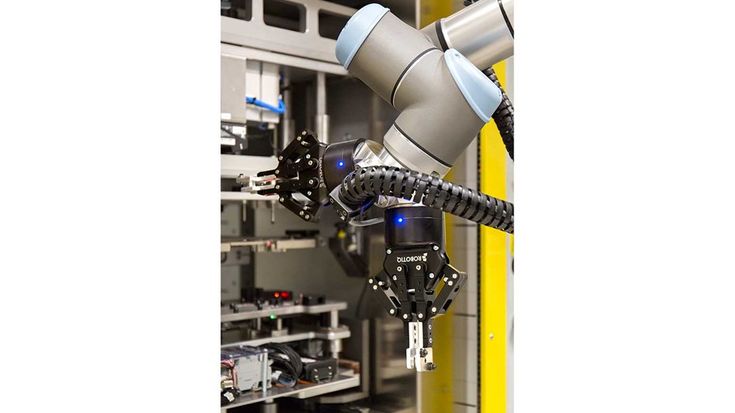
PINZE A DUE DITA/GANASCE
Queste pinze si trovano comunemente negli ambienti di produzione per lavori più piccoli. L’end effector è dotato di due ganasce parallele con bordi piatti. Si aprono e si chiudono, bloccando il pezzo e mantenendolo stabile con forza. Tuttavia, questi tipi di pinze, non sono adatte quando si tratta di gestire forme e dimensioni irregolari.
PINZE A TRE DITA/GANASCE
Le pinze a tre dita sono dotate di tre appendici prensili o ganasce che si chiudono sull'oggetto e lo tengono al centro. Queste sono comunemente usate per articoli rotondi o cilindrici.
ADATTIVO O MULTI-DITA
Le pinze adattive spesso hanno più dita realizzate con materiali malleabili e morbidi. Sono progettate per la presa di oggetti rotondi, irregolari e/o delicati. Possono essere utilizzate per linee di produzione alimentare, o per trattare oggetti piccoli e fragili.
PINZE MAGNETICHE
Come suggerisce il nome, le pinze magnetiche utilizzano una superficie magnetizzata per afferrare oggetti di metallo. Questo tipo di pinza di solito non incorpora dita o ganasce, ma fa affidamento su superfici magnetiche lisce per la manipolazione. Le pinze magnetiche sono comuni nei settori in cui la lamiera e le parti automobilistiche vengono spostate lungo una catena di montaggio.
PINZE MORBIDE E FLESSIBILI
Le pinze robotizzate morbide e flessibili sono realizzate per maneggiare oggetti delicati senza causare danni o segni di graffi. Ad esempio, le pinze morbide certificate per alimenti in silicone vengono utilizzate per la manipolazione di alimenti o articoli che richiedono un ambiente privo di contaminanti.

PINZE INCEPPANTI
Un'affascinante pinza robotica che utilizza materiali granulari, come chicchi di caffè o perline di plastica, racchiusi in un morbido guscio esterno per afferrare e trattenere l'oggetto. Una pinza robotica per inceppamento può adattarsi a diverse dimensioni e forme, rendendola una scelta versatile, ideale per la manipolazione di articoli dalle forme irregolari. Le pinze a inceppamento funzionano toccando delicatamente l'oggetto, quindi viene applicata la pressione dell'aria, facendo "inceppare" i grani interni della pinza, creando una presa sicura. Quando l'aria viene rilasciata, il materiale granulare si "sgancia" di nuovo, facendo cadere l'oggetto.
PINZE IDRAULICHE
Si tratta di pinze per impieghi gravosi che applicano la forza maggiore richiesta per oggetti grandi o pesanti. Le pinze idrauliche sono progettate con pistoni, il che significa che possono richiedere una manutenzione maggiore rispetto ad altre varietà di pinze.
PINZE PNEUMATICHE
Le pinze pneumatiche funzionano utilizzando aria compressa e pistoni (a differenza delle pinze elettriche). I sistemi di presa pneumatica richiedono un'alimentazione d'aria che fà sì che la pinza si chiuda sull'oggetto. La pinza si apre e rilascia l'oggetto quando viene rilasciata la pressione.

PINZE A VUOTO
Le pinze a vuoto sfruttano la differenza tra la pressione dell'aria interna della pinza e la pressione dell'aria esterna per sollevare, trattenere e spostare gli oggetti. Le ventose fungono da punto di contatto tra l'oggetto e la pinza del robot. Semplicemente cambiando le dimensioni e la forma e le ventose ti permetteranno di gestire facilmente i cicli di prodotti misti. Alcune ventose richiedono un'alimentazione d'aria esterna, ma non tutte. Diverse ventose sono dotate di generatori di vuoto integrati attivati dalla stessa alimentazione elettrica del robot, eliminando così la necessità di un sorgente d'aria esterna.
Che tu stia cercando una pinza per la manipolazione delicata degli alimenti o per la robusta carpenteria metallica, il mercato è ricco di soluzioni. Il tuo braccio robotico Universal Robots può essere dotato di un'ampia gamma di pinze, garantendo un lavoro coerente e senza errori.
Prenota una demo per testare con mano le potenzialità dei cobot UR.
