



Close 
Choose your language

概要
今回はユニバーサルロボットの「ダッシュボードサーバー」について紹介します。
ユニバーサルロボットは、簡単にティーチングできる点が特徴です。しかし、生産ラインに組み込んだ後は、ペンダントを操作する機会が少なくなることもあります。そのため、現場の作業者には、タッチパネルや操作盤を使って最低限の操作だけをしてもらうケースもあります。また、URをAGVなどの移動台車に搭載する場合など、ペンダントを使わずに操作したい場面もあります。そこで、今回は遠隔操作を可能にする「ダッシュボードサーバー」について説明します。
ダッシュボードサーバーとは?
ダッシュボードサーバーとは、一部の例外を除き、ペンダント画面の上下にある黒いバー部分の操作をリモートで行うための機能です。たとえば、以下のような操作が可能です。
- ロボットの初期化(アーム電源投入・ブレーキ解除)
- プログラムの開閉・開始
- ロボットの状態監視(問題なく動作しているか、非常停止がかかっているetc.)
- 自動・手動モードの切り替え
- ティーチペンダントの取り外し

一方、ダッシュボードサーバーでは以下のような操作はできません。
- プログラムの作成・修正
- WAYPOINT(ウェイポイント)の再ティーチング
- I/Oの制御
- 安全設定の変更
- 位置データや速度などの数値データのやり取り
数値データをやり取りしたい場合は、別の通信プロトコル(ModbusやETHERNET/IPなど)を併用する必要があります。同時接続は可能です。
ダッシュボードサーバーの接続方法
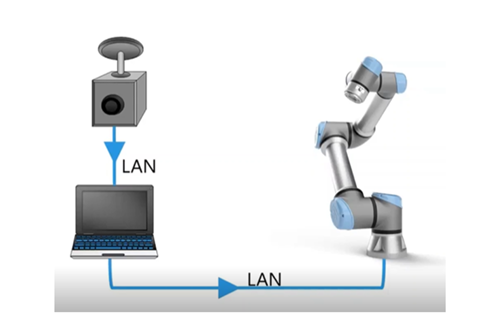
ダッシュボードサーバーを利用するには、ロボットがサーバーとして動作し、クライアントとなる装置を準備する必要があります。クライアント装置は、(PCやPLCを想定)ソケット通信を通じて文字列を送受信できる機能が必要です。
接続の手順は以下の通りです。
1. PCとロボットのIPアドレスを合わせる
(詳細は「テクニカルガイダンス1 ソケット通信」で解説しています)
2. クライアントからロボットへ接続を実行する
- ポート番号「29999」を指定
- ペンダントからロボットを「リモートモード」に切り替える
3. コマンドを送信してロボットを操作する
コマンドと改行文字を一緒に送信すると、リモートでロボットを制御できます。
ダッシュボードサーバーで実行できるコマンド
代表的なコマンドには、以下のようなものがあります。
- load [プログラム名]:指定したプログラムを読み込む
- play:プログラムを開始
- stop:プログラムを停止
- poweron:ロボットの電源をON
- brake release:ブレーキを解除
- safety mode:ロボットの安全状態を確認
その他のコマンドについては、ユニバーサルロボットの公式サイトで確認できます。
運用時の注意点
ダッシュボードサーバーを利用する際には、以下の点に注意してください。
1. コマンドには改行文字が必要
例えば、「play」コマンドを送信する際は、「play\n」のように改行文字を追加する必要があります。クライアントの環境によっては異なる改行コードを使用する場合があるため、機器のマニュアルを確認してください。

2. プログラムのWAYPOINT設定に注意
プログラムを外部から開始する場合、最初のWAYPOINTは「変数WAYPOINT」や「相対WAYPOINT」に設定する必要があります。固定のWAYPOINT名を使用すると、リモート操作ができないため注意してください。

3. 安全確認の徹底
リモート操作を実行する前に、周囲の安全を十分に確認してください。ロボットの動作中に周囲の物体と接触しないよう注意が必要です。
4. リモート制御を有効化する
リモート制御モードに切り替えないと、外部からの操作ができません。ただし、状態の監視だけならローカル制御のままでも実行可能です。
実際の接続と操作
ここからは、実際にダッシュボードサーバーを使った操作を説明します。
1. ペンダントをリモートモードに切り替える
- 右上の「ハンバーガーメニュー」から「ロボット設定」→「システム」→「リモート制御」を開き、有効化する。

- 画面右上に「ローカル」というマークが表示されたら、クリックして「リモート制御」に変更。

2. クライアント側から接続する
- ロボットのIPアドレスを入力
- ポート番号「29999」を設定し、接続(CONNECT)を実行
- 接続が成功すると「CONNECTED UNIVERSAL ROBOT DASHBOARD SERVER」と表示される

3. ロボットを操作する
- 「power on」を送信 → ロボットの電源をON
- 「brake release」を送信 → ブレーキを解除
- 「load [プログラム名]」を送信 → 指定したプログラムを読み込む
- 「play」を送信 → プログラムを実行
- 「pause」や「stop」を送信 → プログラムの一時停止や停止

4. ロボットの状態を確認する
- 「robotmode」コマンドを送信すると、ロボットの現在の状態を取得可能
(例:「RUNNING」が返ってくれば、ロボットが正常に動作中)

このように、ダッシュボードサーバーを利用すれば、遠隔からロボットの操作や状態監視が可能です。ぜひ活用してみてください。
ご不明な点がありましたら、ユニバーサルロボットまでお問い合わせください。
