Close 
Choose your language

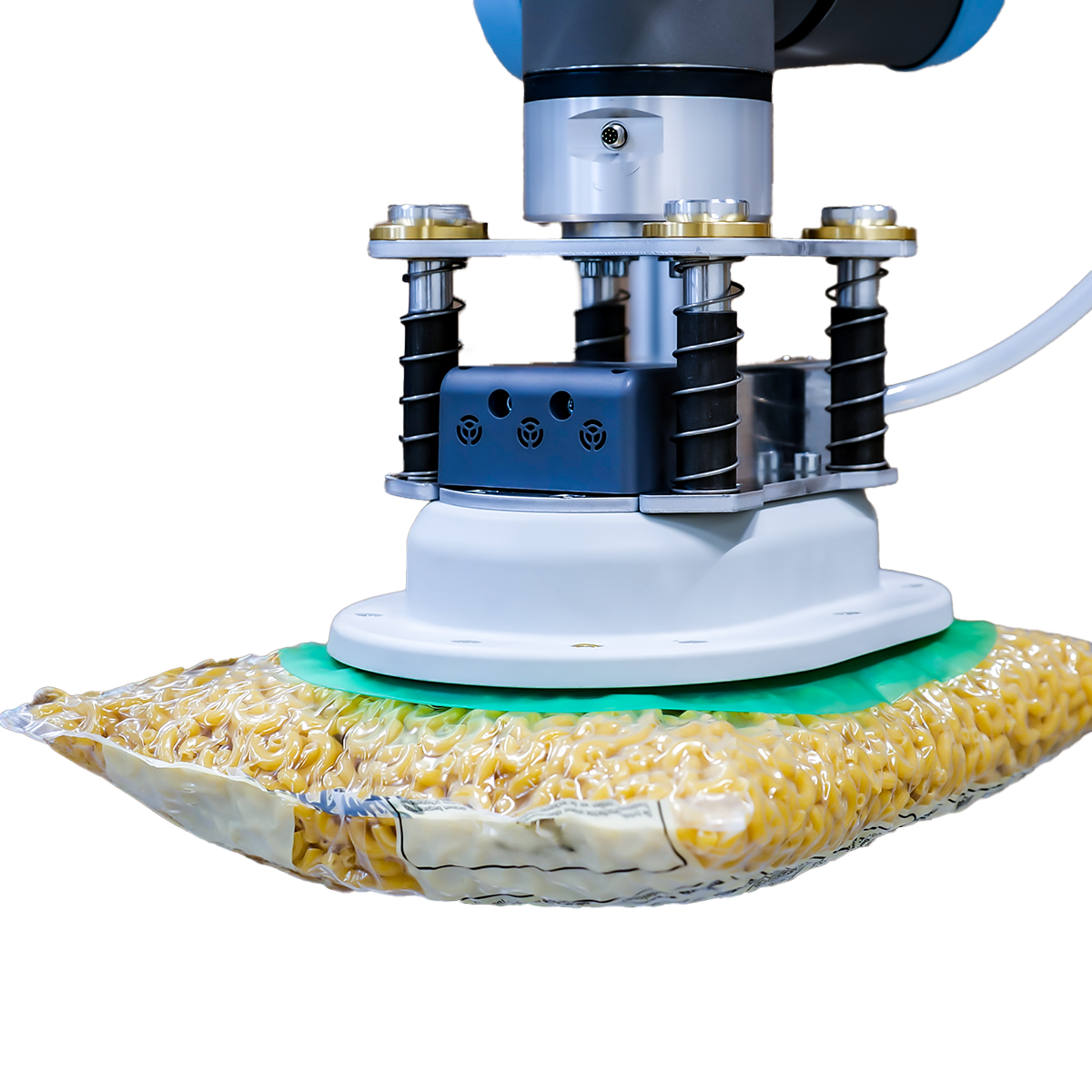
Schmalz オーダーメイド式軽量ハンド SLG











特長
- ピック&プレースおよびピッキングアプリケーションでの使用
- 凹凸や曲面のあるワークや複雑な形状のワークに合わせて自在に設計可能な軽量ロボットハンド
- オンライン上のコンフィギュレータを使用し、ワークサイズやアプリケーション内容を入力するだけで、誰でもハンドを設計可能
- 3Dプリンタを使用し、エア配管も含めて生成されるため、ハンドの組立工数を削減
- コンフィギュレータ上でロボットフランジも含めて選択可能なため、セットアップも容易
- コボットポンプECBPi接続型をラインアップし、URCapを使用した容易なセットアップにも対応
製品のしくみ
オーダーメイド式軽量ハンド SLGは、直感的かつ容易に設計・使用が可能なロボットハンドです。圧縮エアの供給で作動する「真空発生器一体型」、既設の真空発生器との併用が可能な「真空発生器外付け型」、エアレスで使用可能な小型真空ポンプECBPiとの接続が可能な「コボットポンプECBPi接続型」の3種類からお選びいただけます。オンライン上のコンフィギュレータを使用し、お客様ご自身でワークや要件に合わせたロボットハンドを設計することが可能です。パッドの数量や種類はお客様の任意で変更することも可能です。
作業用途
製品分類
プロパティ
対応ロボット型番
Available globally
認証・規格
2006/42/EG 機械指令
2014/30/EU 電磁両立性指令(EMC)
EN ISO 12100 機械類の安全性 – 基本概念、設計のための一般原則 – リスクアセスメント
EN 61000-6-3 / EN 61000-6-4 電磁両立性 - エミッション
EN 61000-6-1 / EN 61000-6-2 4 電磁両立性 - イミュニティ
EN ISO 9409-1 産業用ロボット – メカニカルインターフェース
EN ISO 10218-8 産業環境向けロボット – 安全要件 – パート2:ロボットシステムと統合
寸法
寸法はお客様の構成によります
最大長さ:350mm
最大幅:350mm
最大高さ:350mm
ワークの最大重量:10k g
同梱物
お客様の構成によります
真空発生器一体型|真空発生器外付け型|コボットポンプECBPi接続型
ロボット接続用フランジプレート
真空パッド
ユーザーマニュアル
ライセンスの種類
1回限りの購入、URCapを含む











ご意見をお聞かせください
ウェブサイトへ
ありがとうございました
見積もり請求を送信しました
お客様のご要望は、UR+のパートナーに送信され、できるだけ早くご連絡いたします。
Tell us about your needs
-
-