Universal Robots’un kolaboratif robotları, dağıtma, yapıştırma, çapak alma, cilalama gibi uygulamalarda otomasyona geçilmesini sağlayarak işin kalitesini ve verimliliğini artırıyor. Ancak özellikle teknolojinin gelişimiyle iş süreçlerinde yaşanan değişimler bu alanlarda da birtakım yenilikler yapılmasını gerektiriyor. Müşterilerini dinleyen ve ihtiyaçlarını en iyi şekilde analiz eden Universal Robots, ilk etapta patentli programlama arabirimi Polyscope 5.4’e Remote TCP (Uç Elemanın Merkez Noktası) özelliğini eklemişti. Bu özellik ile cobot’ların sabit (remote) TCP’ye göre sabit bir hızda hareket etmesi sağlanmıştı. Yeni Polyscope 5.6 ise daha da heyecan verici bir özellik olan G-Kodu (G-Code) takım yolu desteği ile birlikte yayınlandı.
Fransız makine atölyesi BWIndustrie, işlenmiş parçalardaki çapakların giderilmesi işlemlerini optimize etmek ve otomasyona geçmek için Universal Robots’un kolaboratif robotu UR16e kullanmaya başladı. Yılda 300 ila 300 bin arasında değişen sayılarda seri üretim yapan şirket, sürecin tekrarlanabilirliğini garanti altına almayı hedefliyor Ürünün programlanması TCP uzaktan kontrol fonksiyonuyla operatörler tarafından gerçekleştiriliyor.
ROBOTLARIN KARMAŞIK YÖRÜNGELERİ ÖĞRENMELERİ GÜNLER ALABİLİR
Peki, Universal Robots neden böyle bir özellik eklemeye ihtiyaç duydu? Kolaboratif robotları kullananların çok iyi bildiği üzere, robot hareketleri el kumandasındaki ara noktalar ve döngü hareketleri ya da elle hareket ettirilerek programlanıyor. Bu yaklaşım makine destek, paletleme veya alma-yerleştirme gibi yaygın cobot uygulamalarında mükemmel sonuç verir. Ancak robotların karmaşık yörüngeleri takip etmesini gerektiren uygulamalar da söz konusudur ve bu gibi durumlarda verimli sonuç almak pek de mümkün değildir. Bir arabanın motor bloğu üzerine sıvı conta dağıtmak için programlamanız gereken bir robot olduğunu varsayalım. Robotun sabit olmayan tüm bu geçiş noktalarını öğrenmesi saatler, hatta günler alabilir.
HİÇ ÇÖZÜM YOK MU?
Üretim süreçlerindeki bu zorluğu gören Universal Robots, ilk etapta piyasadaki birçok çözümü gözden geçirdi. Bu zorluğu aşmanın ilk yolu, robotik çevrimdışı programlamaydı (OLP). Bu programlamada ilk olarak sanal bir çalışma hücresi oluşturulur. Ardından robot hareketi programlanıp simülasyonu sağlanır. Son olarak yazılım, doğrudan robota yüklenebilen bir program dosyası çıktısı verir. Bazı müşteriler için kabul edilebilir bir yöntem olmakla birlikte OLP yazılımı gerek bütçesi gerek bu yazılımı kullanmak için yetkin bir çalışana ihtiyaç duyulması nedeniyle pek çok işletmeyi farklı arayışlara itiyor. İşte Universal Robots tüm bu değerlendirmelerin sonucunda G-Kodu takım yolu desteğini yayınlamaya karar verdi.
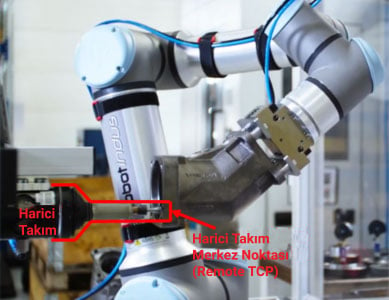
Harici Takım Merkez Noktası (RTCP - Uç Elemanın Remote Merkez Noktası) sabit hızda sabit bir parçayla teması korurken cobot’un iş parçalarını hareket ettirmesini sağlar.
Fancort UR+ Dağıtma Kiti kullanarak oluşturduğumuz bir dağıtma demosu
NEDEN G-KODU?
CNC makinelerde kullanılan bir programlama dili olan G-Kodu, makinelerdeki motorların hangi yolu izleyerek hangi yöne ve hangi hızda hareket edeceğini belirtir. Robotlar da temel olarak CNC makinelere benzer, çünkü tüm bağlantılar motor tarafından yönlendirilir. Universal Robots ekibi, robot komutlarını oluşturmada en uygun yolu belirlerken buradan yola çıktı ve CAD / CAM yazılımı tarafından yaygın olarak desteklenen G-Kodu’nu seçti. Halihazırda bir CAD / CAM paketi kullananlar ek bir yazılım satın almaya veya öğrenmeye ihtiyaç duymaz ancak diğer programlar için bu geçerli değildir çünkü DXF gibi diğer formatlar bir yolun geometrisini tanımlayabilse de araç yerleşimi, hız ve ivme gibi robot programlamada gerekli tüm bilgileri genellikle içermez.
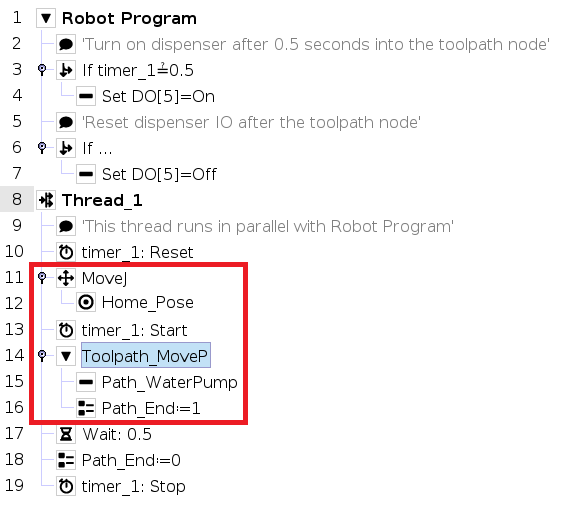
Kolaboratif robot, jelin iş parçasına eşit ölçüde sürülmesi için bu karmaşık yolu sabit hızda takip edebilir. Polyscope’taki program ağacı da oldukça basittir. Ara noktalar ve döngü hareketlerinden oluşan uzun bir listenin programlanmasına artık gerek yoktur.
ADIM ADIM TAKIM YOLU TANIMLAMA
Universal Robots’un kolaboratif robotlarına yeni takım yolunu tanımlamak oldukça hızlı ve kolay.
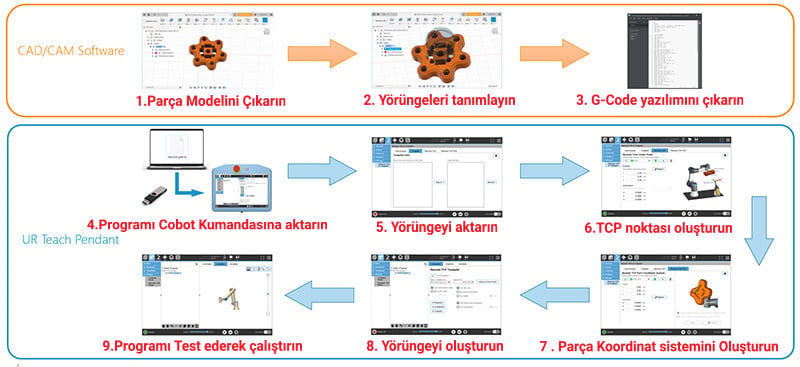
Birinci Adım: CAD / CAM yazılımınızdaki iş parçanızın CAD modeline göre bir G-Kodu takım yolu tanımlayın.
İkinci Adım: G-Kodu takım yolunu bir USB aracılığıyla Polyscope'a aktarın.
Üçüncü Adım: Takım yolunuzun referans çerçevesi olan parça koordinat sistemi yapılandırmasıyla robota takım yolunun nerede olduğunu söyleyin.
Robot artık takım yolunuzu programda yürütmeye hazır!
Takım yolu oluşturulduktan sonra, kullanıcının Polyscope’ta bir program oluşturması genellikle yarım saatten az sürüyor. Kısacası, robot programlama süresi önemli ölçüde azalıyor.
Universal Robots’un bu yeni G-Kodu takım yolu özelliği, Remote TCP ile birlikte Polyscope 5.6’daki Remote TCP & Toolpath URCap içerisinde de bulunuyor. Bu da Remote TCP ya da normal TCP yoluyla bir takım yolu oluşturmaya olanak tanıyor.
URCap’i kullanmaya başlamadan önce robotunuzu buraya kaydedip aktive ettiğinizden emin olun. Programın oluşturulması, kullanımı ve diğer tüm detaylar için web sitemizdeki Kaynaklar/Destek bölümünü tıklayarak öğretici videolardan, teknik notlardan ve örnek programlardan yararlanabilirsiniz.








