


協調運動功能
將您的焊接或堆棧解決方案推向全新境界!協調運動是一套軟體功能,可實現協作型機器人工具中心點(TCP)與一至多個電動軸之間的同步運動。
換言之,協作型機器人和多個外部軸在搭配協調運動功能後,運作時將更加順暢。此外,它也有助於使用者實現自動化循環時間最佳化,並保持精確的工具路徑,進而提高整體作業效率。
連接 UR 機器人與生產線,一條電纜就能搞定
PROFIsafe 讓 e 系列協作型機器人與生產線的整合不再是難事!
有了 e 系列專用的PROFIsafe,協作型機器人與工廠生產線的整合變得更加輕鬆簡單。e 系列專用 PROFIsafe 是 PolyScope 的原生整合功能,可供協作型機器人與 PLC 進行失效安全(failsafe)的 I/O 交換,例如緊急停止(Emergency Stop)、減速模式(Reduced Mode)與安全歸位(Safe Home)等。如此一來,對於那些想要將 UR 機器人導入工廠生產線的客戶來說,不再需要繁瑣的布線工程與額外的 PLC IO 模組,也能實現產線控制的安全數據交換。

功能特色
節點編程
透過樹狀結構實現編程視覺化程式。
FreeDrive 功能
透過手動移動機械手臂的方式,快速定位機器人。
力矩模式
預先編程機器人的操作力道,並結合力矩感測器。
內建設定精靈
自動估算重量、重心和工具中心點(TCP)。
透過專屬安全工具箱輕鬆配置各項安全設定。
可供下載並安裝的軟體外掛程式。
可為元件與應用程式新增進階功能。
基於 Python 的腳本語言,可供使用者撰寫進階功能程式。
無需編程專業
編程時只需透過選單選取節點,並排列操作順序。使用者可對每個節點的參數進行配置,並透過這些節點對機器人下達指令。例如「移動」節點將指示機械手臂在空間中如何移動,「設定」節點則可切換機器或設備的訊號。
剪下、複製與貼上等功能也讓建立與編輯程式變得更加簡單,讓機器人短時間內就能恢復運作。

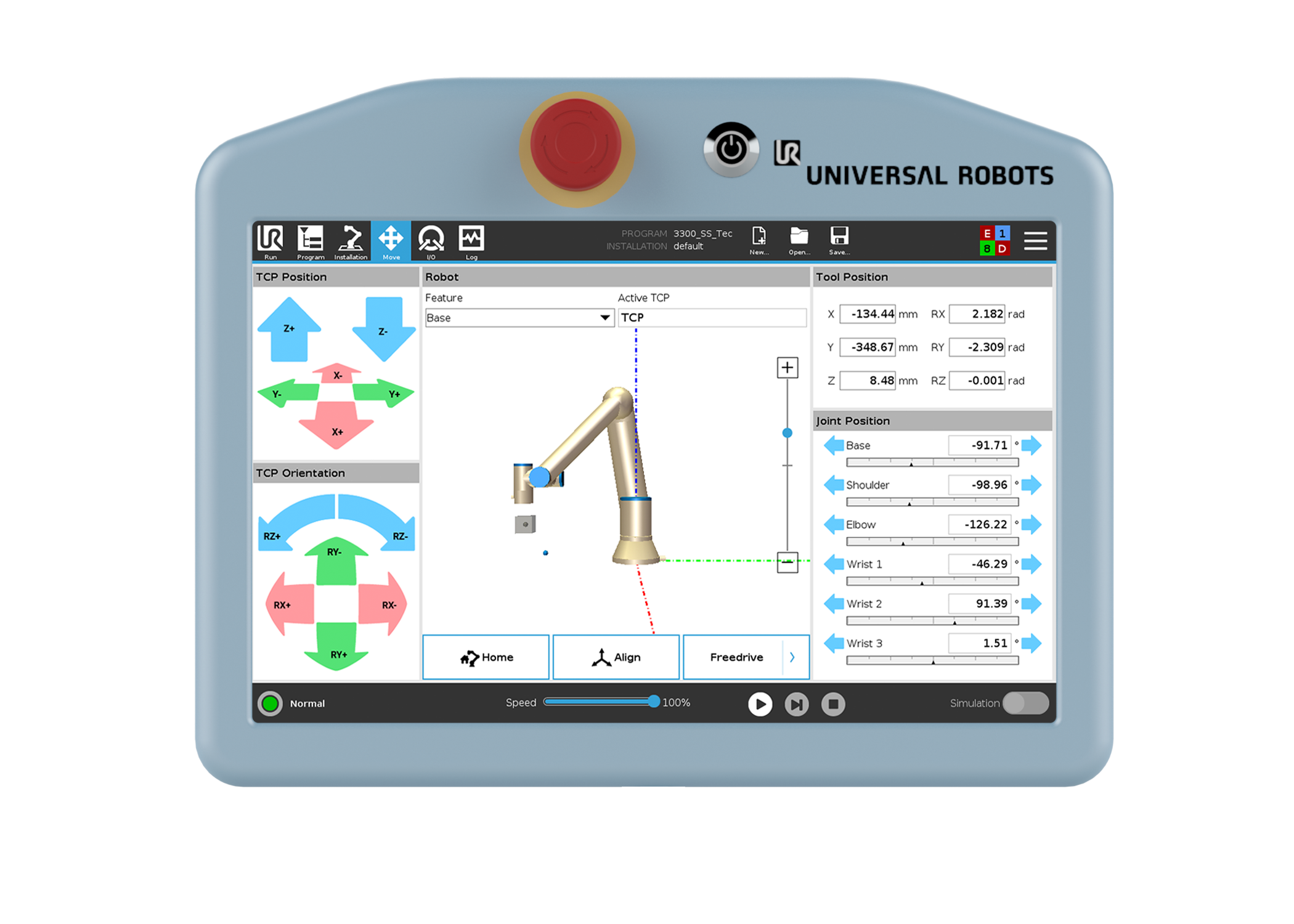
規劃機器人運動路徑
透過 PolyScope 的「FreeDrive」功能,您一鍵就能將機器人移動到理想位置。如果礙於應用的配置無法接近機器人,可以使用示教器上的彩色箭頭遠端移動機器人。最後再直接於軟體中輸入數值對設定進行微調,以實現精確的運動表現。
內建安全工具箱
協作型機器人仍屬於工業機械的一種,因此安全至關重要。e 系列專屬 PolyScope 結合了 17 項通過認證的安全功能,有助於減少風險並確保自動化作業安全無虞。使用者可在專屬的安全選單中選取安全措施,例如建立安全平面或限制關節運動範圍等。

完整的解決方案整合
支援常見的工業通訊標準,例如 Modbus、PROFIsafe 和 Ethernet/IP。
此外,使用者也可透過 URScript API 體驗 PolyScope 的靈活性。使用者除可完全利用節點編程建立大多數的應用程式和任務外,還能透過進階功能支援更複雜的配置,並經由低電壓接點連接第三方感測器。
例如,您可使用 「read_input_integer_register()」從 PLC 讀取暫存器數據,或使用「get_actual_joint_positions()」監控機器人的關節位置。

運動更順暢。效果更快。
OptiMove 提供直覺的方式來設定相對速度和加速度,提供簡易的調整、更平滑的運動和更快的週期時間。直覺的運動程式設計簡化了設定與操作,而重複性的改善則確保每次都能得到一致的高品質結果。大幅降低震動,增強精密度與可靠性。使用 OptiMove,您可以避免不必要的保護停機,最大化正常運作時間和生產力。下載 PolyScope X 10.7 探索。


MotionPlus
MotionPlus 是一套軟體功能,可讓 cobot 的 TCP 與一個或多個電動軸同步運動,讓您的焊接或托盤解決方案更上一層樓。MotionPlus 可讓 cobot 與多個外部軸配合使用時,過程更加順暢。它可讓使用者優化自動化週期時間,並遵循精確的刀具路徑,從而提高效率。




