將真人 / 機器人協作提升到全新境界
太汙穢,太骯髒,太笨重?還是太熱或太冷?對協作型機器人來說可不是這樣!協作型機器人可持續在幾乎任何工作環境下運作,從廠房、供餐廚房到無塵室都可適用,讓真人同僚不需處理單調的,人因工程上不適合的任務。德國弗萊貝格工業大學 (Technische Universität Bergakademie Freiberg) 的科學家們現在進行兩項令人驚奇的專案,來研究協作型機器人能如何讓真人同僚們的生活更輕鬆:第一項是測試協作型機器人是否可以光憑看著真人從事工作就加以學習。第二項則是研究在地底採礦這樣的危險工作環境中,機器人能扮演怎樣的角色。
玩樂高的機器人:為何 UR5 機器人在 TU Freiberg 造了個玩具火箭
觀看 UR 機器人學習並模仿真人的樂高組合技巧 – 接著,火箭升空了。
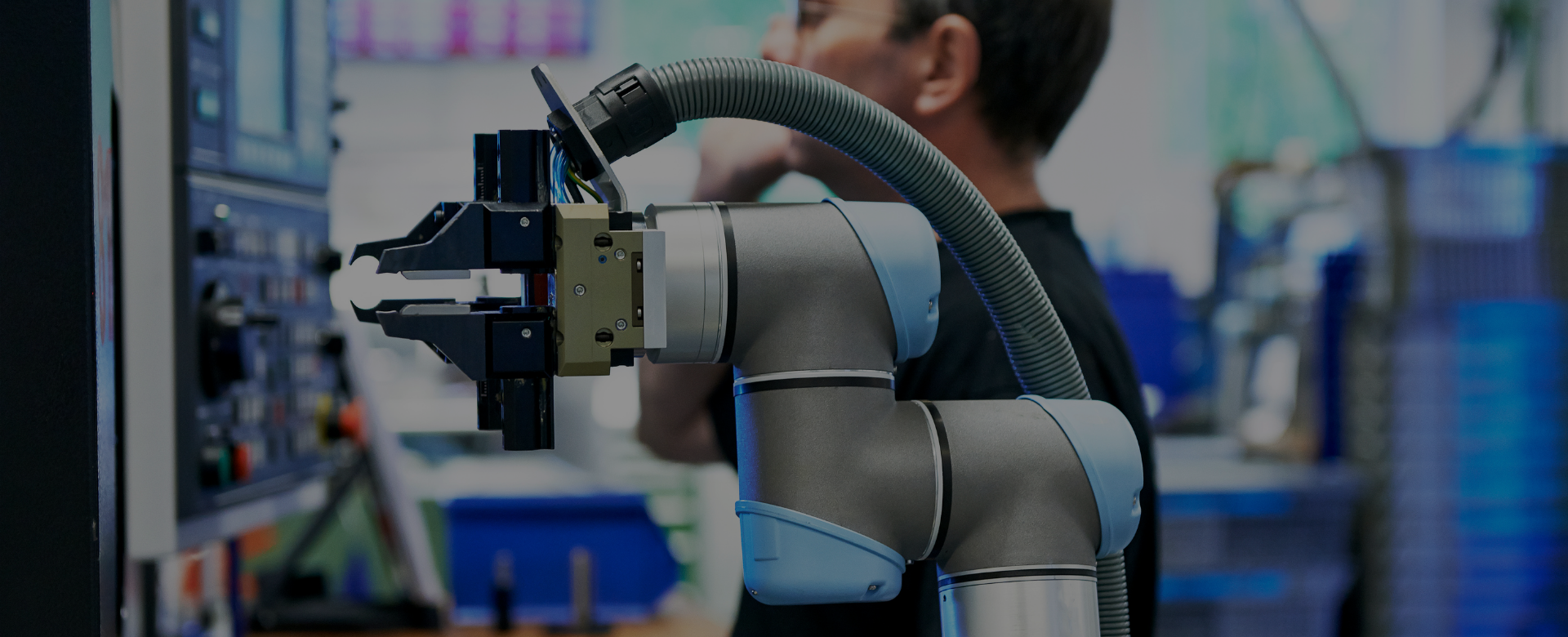
David Vogt 是 TU Freiberg 的研究員,同時也是兩個男孩的爸爸,在陪著孩子玩樂高時,突然想到了這件事:可以教機器人玩樂高嗎?他好奇地想要知道,於是開始進行測試,並使用大學校內的 UR5 機器人當作玩伴。該 UR5 協作型機器人配備了 3 爪夾爪及十二部攝影機。另外,科學家們也在手臂及手上穿戴了特殊的感應器,讓 UR5 可以監控他們的所有動作,用孩子的學習法進行學習:單純的觀看。
Vogt 希望 UR5 可以做出一個樂高火箭,就跟他與孩子所做出來的一樣,但這需要高度的靈活技巧。對 UR5 來說,這完全不成問題:機器人僅看過一次 Vogt 拼出樂高火箭後,就可以順利加以重建。此外,協作型機器人不只是一塊一塊拼起樂高,甚至嘗試分析真人同僚的作為,並盡可能地加以協助。例如,機器人手臂看到了科學家即將要拼下一塊,於是就挑起了適合的一塊,並傳遞給科學家。Vogt 和他的同僚們都對這個結果感到十分開心 - 截至目前為止,這是世界上少數能夠只觀看真人就加以學習的機器人之一。持續開發此技術代表著,終有一天不須在開始新工作之前先編寫協作型機器人的程式,而只要看著就可以學習 – 這可讓工業生產等各行各業使用協作型機器人更簡單,價格也更合宜。
這是採礦機器人 Julius
對於 Freiberg 的另一套機器人系統 Julius 來說,就沒有玩樂高這麼享受了。他的工作可要辛苦的多:作為歐洲唯一擁有研究及教學多功能礦場的大學,TU Freiberg 的 Mining-ROX 專案團隊正在研究 Julius 這樣的自動化機器人如何承接礦業真人員工的高風險工作,並在救援情境中提供協助。

裝在一機動型機器人上的 UR5 戴著黑色袖套,來防塵及防碎石。照片由 TU Freiberg 的 David Vogt 提供
採礦一直都是高危險的工作,而且在地底下工作也十分困難:環境又熱又潮濕,氧氣量亦較低。礦坑崩塌或爆炸的永久性風險對工人來說是再真實不過的威脅,而且這情況在未來只會更加惡化:由於淺層礦產開發殆盡,礦坑越挖越深,現在最深的礦場已經挖到地底下 2 英里 (約 3.22 公里) 深的地方了。這樣的條件對真人來說幾乎無法承受,但對於 Julius 這樣的機器人來說,卻完全沒有問題。機器人 Julius 是本計畫兩部機器人研究平台的其中之一,他的名字來自德國數學家及工程師 Julius Weisbach。Julius 的組成,是一部配備 Robotiq 3 爪夾爪的 UR5 機器人,並安裝在 Innok Robotics 車輛上。
目前 Julius 的其中一個工作,是進行礦場探勘任務時的助理。機器人將陪著真人探勘員出任務,背負著沉重設備,並收集來自手持量測裝置的感應器資料。這個手持量測裝置,是專為真人使用所設計的。在另一個情境中,機器人將被遙控,用於勘查對真人來說不安全的礦場區域,比如說,在災難事件或廢棄礦坑中。為了這樣做,必須藉由在整個礦場中放置 Wi-Fi 中繼站,讓機器人得以與基地站點建立資料通訊連結。對於未來,TU Freiberg 的教授 Bernhard Jung 說:「未來的超深礦坑將會是非常高溫的場所,而且通風和空調系統也是成本上所不允許的。事實上,礦業研究者們的長期展望都是完全自動化的「無人礦場」。」
這兩個極佳的例子,展現了機器人輔助系統的龐大潛力,而我們也對科學家們的下一步感到興致盎然。機器人同僚,請幫幫忙吧!
若您有興趣開始使用我們的協作型機器人,請在此下載我們所提供的免費電子書「開始使用協作型機器人」 。