準確度、重現性及安全性是許多裝置製造的重要因素,特別是在醫療、工業或運輸系統等品質要求嚴格的領域。這些也是讓 UR 協作型機器人與眾不同的重要功能 — 更讓其適合用於對這些產品進行測試以利品質保證。
若能有效率地將日常測試作業自動化,將可帶來多種優勢。在生產階段,自動化可大幅縮短週期時間,而在品管階段,測試組合的標準化可確保結果一致而可靠。
而位於義大利比薩的 BioRobotics Institute of the Sant'Anna School of Advanced Studies 正是最好的例子,他們的研究團隊開發出一個機器人應用情境,將超音波探頭的功能測試加以自動化。這些探頭是由全球頂尖生醫設備製造商的 ESAOTE 所生產,他們特別專精於超音波、專用磁振及診斷過程管理之軟體。
他們選擇了將 UR5 用於測試的自動化。UR5 負載達 5 kg,機器人手臂範圍遠及 850 mm,而重量不到 19 kg,其運用彈性及多元性均相當充足,可用於許多品管及取放物操作。
自動化提升測試的精確度及重現性
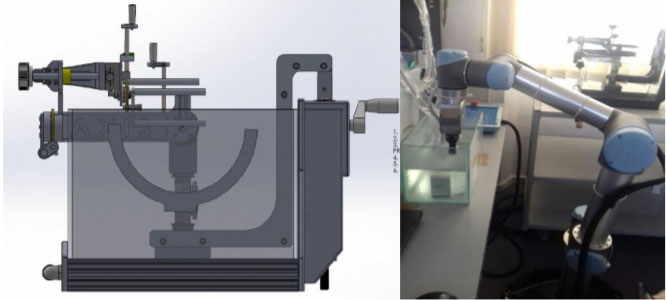 在水槽中進行商用探頭校準:人力機械 (左),以及配有 UR+ 合作夥伴 Schunk 夾爪的 UR5 (右)。
在水槽中進行商用探頭校準:人力機械 (左),以及配有 UR+ 合作夥伴 Schunk 夾爪的 UR5 (右)。
於比薩團隊開發出此應用情境之整合前,探頭的測試組合均由專屬技術人員以人工進行。這些測試將分析滿水容器中發射出的訊號,來確認探頭表示之精確程度。由於水的聲學特性 (超音波速度等) 和人體組織的此類特性相符,因此通常用水進行此種測試。對這些測試來說,探頭是否精確校準是關鍵所在。若將人工校準的三次測試資料和機器人校準的三次測試資料相比,將會發現協作型機器人可確保資料更精確,且具備重現性。
開發者可使用立體三度空間座標 (x, y, z) 記錄機器人手臂的起始位置,而此座標可在程式編寫階段進行設定。這樣可加快測試設定,並讓流程更加可靠。而且,此功能還可去除人工對齊探頭無可避免的變數影響。
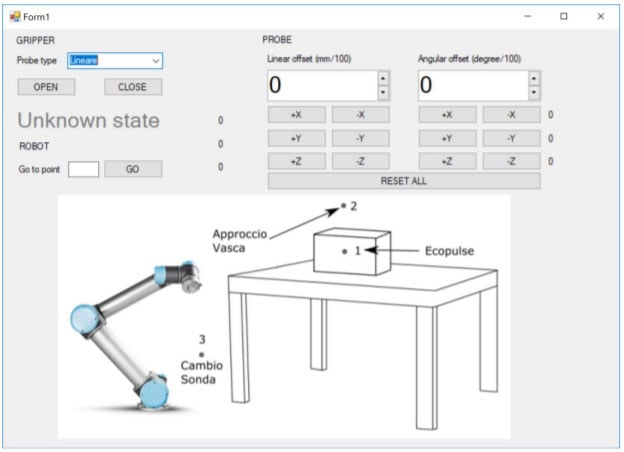 透過電腦上的軟體,可控制機器人,讓使用者設定下列參數/動作:選擇要測試的探頭類型、張開或合上 Schunk 夾爪、將機器人定位至不同測試點、設定平移及旋轉動作的幅度與方向。如圖形化使用者介面所示,軟體可進行三種線性偏移調整,及三種角度偏移調整。
透過電腦上的軟體,可控制機器人,讓使用者設定下列參數/動作:選擇要測試的探頭類型、張開或合上 Schunk 夾爪、將機器人定位至不同測試點、設定平移及旋轉動作的幅度與方向。如圖形化使用者介面所示,軟體可進行三種線性偏移調整,及三種角度偏移調整。
協作型自動化讓機器人及熟手作業員各自發揮到極致
但協作型機器人應用情境所確保的最大優勢卻是人為因素。協作型機器人原生整合的安全功能讓 ESAOTE 常駐在機器人單元周圍的專屬技術人員獲得絕對的安全保障。除了共用空間外,協作者還可運用知識及專業於附加價值更高的工作,這也是協作型 UR 機器人最顯著特性的一部分。就 BioRobotics Institute 應用情境的案例來說,探頭定位等重複性高的工作已交付給機器人手臂,而由掌管整體實驗的專屬技術人員進行監視。
在理想的協作情境中,機器人和人員之間的適當分工,才是成果大幅提升的原因。 若要知道更多,請下載我們的免費電子書「帶領您的團隊開始使用協作型機器人」 - 請點此